
01
Capture or Generate
Ingest real human and robot scans or synthetic Gaussian scenes as spatial evidence.
[Draft for Conference] 2026 Submission
3DGS conversion to environments for policy evaluation with per Gaussian physics priors.
Convert 3DGS scenes captured by humans or robots or generated as synthetic scenes into fully articulated scene graphs with predictive physics properties for policy evaluation and training.
Ingest real human and robot scans or synthetic Gaussian scenes as spatial evidence.
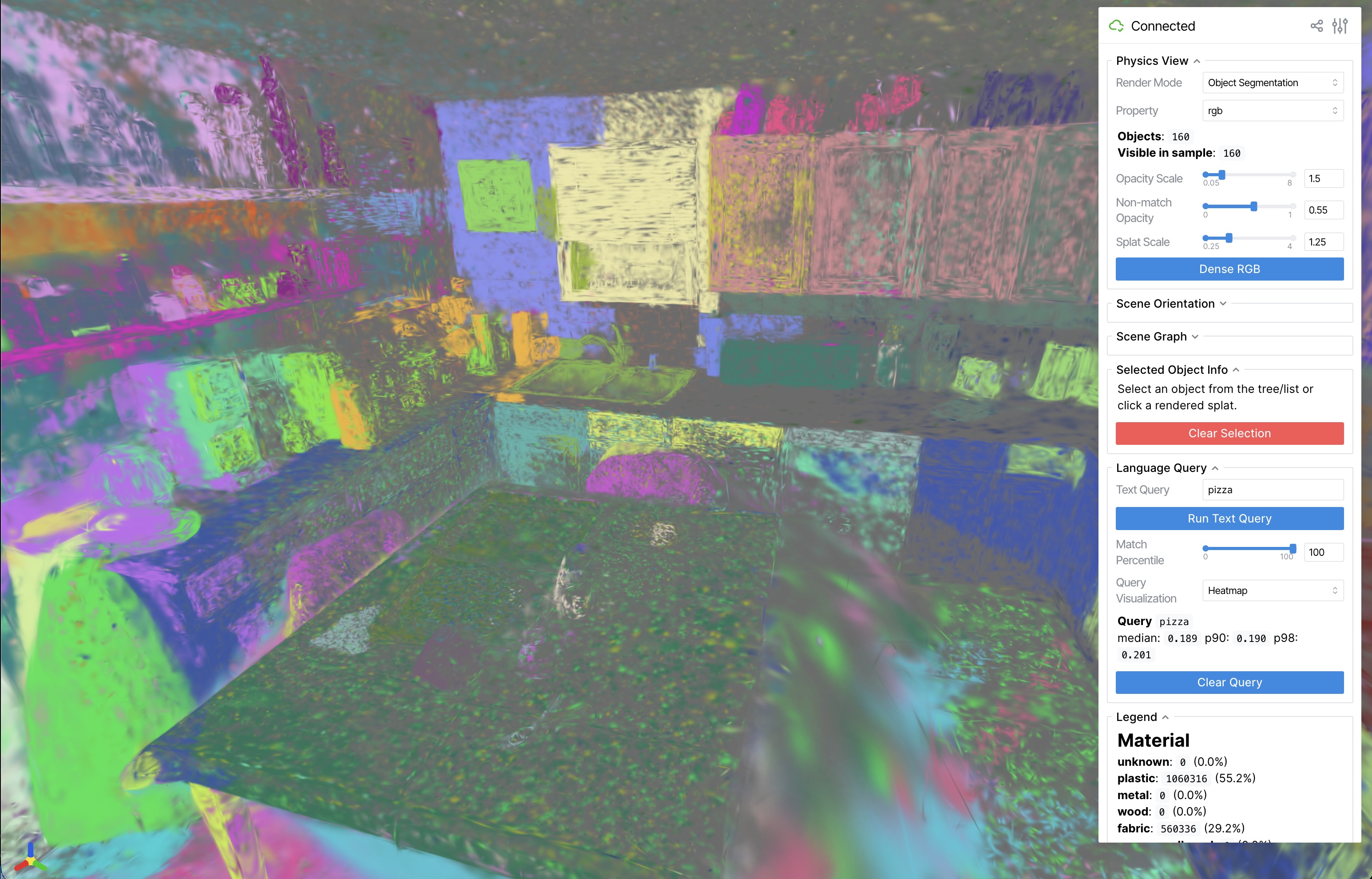
Segment objects, infer articulation, and attach per-Gaussian semantics and physics priors.
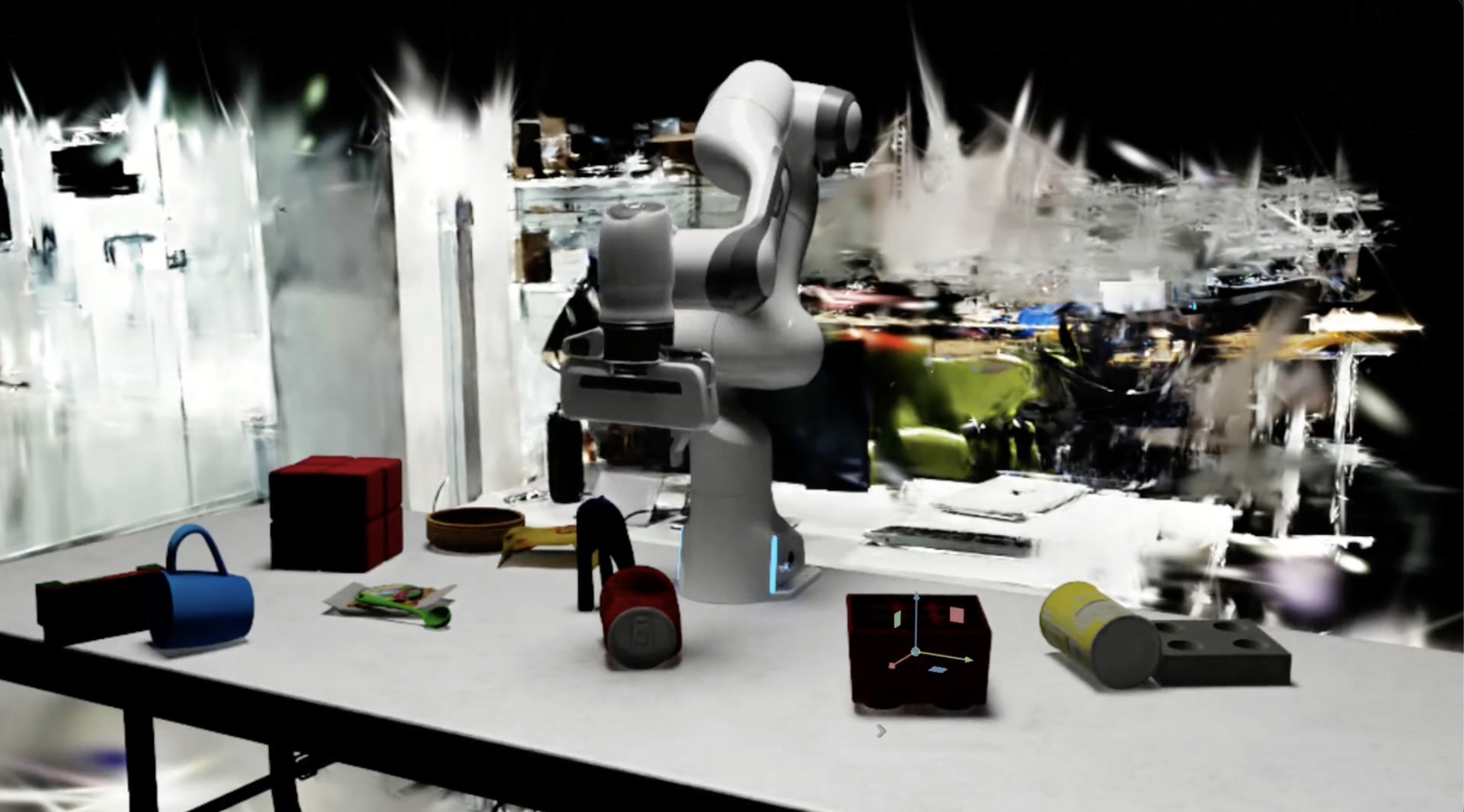
Export simulation assets for Issac Lab, MuJoCo, LIBERO, others for robot policy rollouts, training, and sim-real comparisons.

The system currently works by capturing or generating a 3D Gaussian scene, converting it into an scene graph with semantic and physics priors, then review segmented assets and placements in Isaac Lab before policy runs.
We create annotated physics information on several 3d datasets and then use it to infer physics properties to objects segmented from each scene. We then create an object physics material from this information to represent the object in an OpenUSD file format that may be used across a wide range of simulators.

Next, we need to validate our policies trained in our 3d scanned environments by testing them back sim2real in our lab.
More coming soon.
We evaluated the DROID joint-position policy labels as well as other common VLAs and world models in the converted HCRG 3DGS Isaac environments. These are simulator-side rows only: Pearson, Spearman, and MMRV remain N.A. until we complete real-robot rollouts with the same policies in lab.

@misc{hollis2026real2sim,
title = {Real2Sim: 3DGS conversion to environments for policy evaluation with per Gaussian physics priors},
author = {Hollis, Luke, Tianxing Fan, and Heng Yang},
year = {2026},
note = {[Draft Conference] 2026 submission}
}